12. Correcting for Distortion
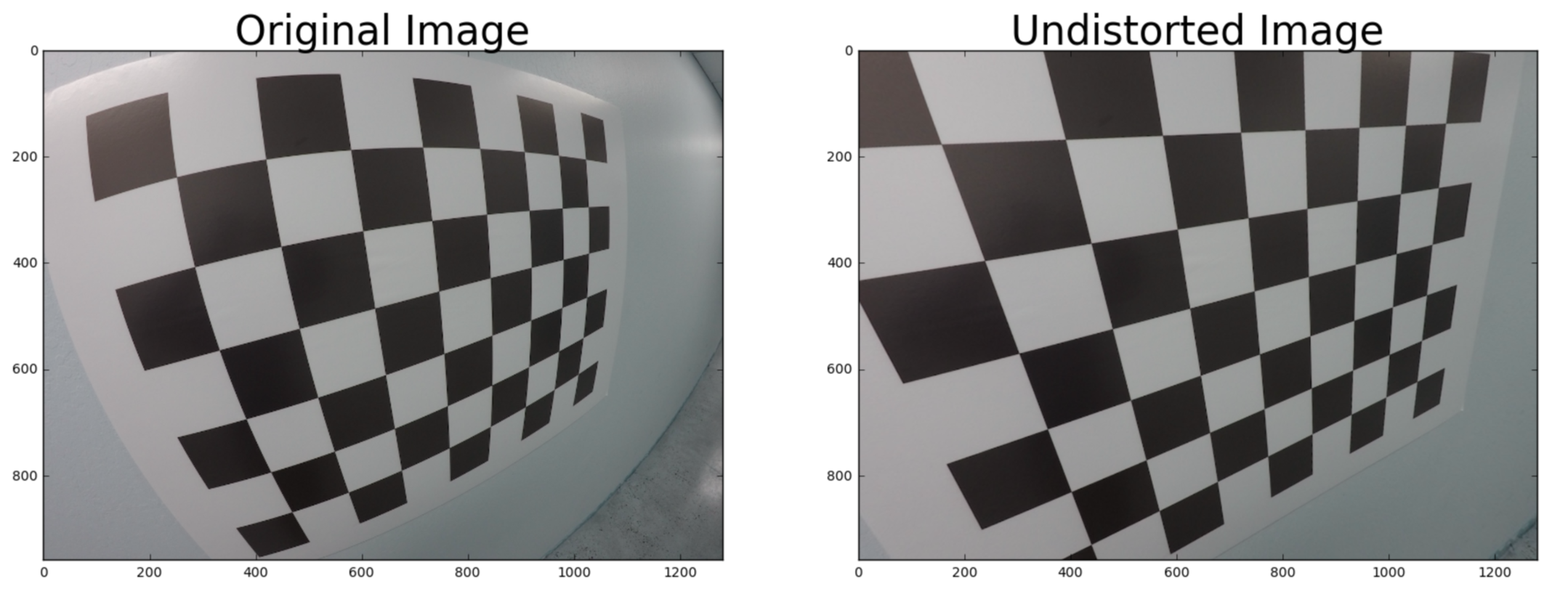
Here, you'll get a chance to try camera calibration and distortion correction for yourself!
There are two main steps to this process: use chessboard images to obtain image points and object points, and then use the OpenCV functions
cv2.calibrateCamera()
and
cv2.undistort()
to compute the calibration and undistortion.
Unfortunately, we can't perform the extraction of object points and image points in the browser quiz editor, so we provide these for you in the quiz below.
Try computing the calibration and undistortion in the exercise below, and if you want to play with extracting object points and image points yourself, fork the Jupyter notebook and images in this repository . You can also download the distortion pickle file and test image used in the below quiz if you'd like to run the below code on your own machine.
If you run into any errors as you run your code, please refer to the Examples of Useful Code section in the previous video and make sure that your code syntax matches up!
Distortion Correction
Start Quiz:
Challenge: Calibrate your own camera!
If you're up for a challenge, go ahead and try these steps on your own camera images. Just print out a chessboard pattern , stick it to a flat surface, and take 20 or 30 pictures of it. Make sure to take pictures of the pattern over the entire field of view of your camera, particularly near the edges.
To extract object points and image points you can check out the Jupyter notebook in this repository . If you're following along with the code in the notebook, be sure you set the right size for your chessboard, the link above is to a 9 x 6 pattern, while before we were using an 8 x 6.